Imagine you are the head of the education department of a metropole like São Paulo, the biggest city in Brazil. The mayor commended a survey to evaluate how well the schools were distributed around the town. Not that well, sadly. There exist some empty terrains and the mayor wants to use this space to build new schools, but he is not sure of how many to build neither where the best locations are. Your task is to assign the construction sites of the new schools.
The schools should be positioned following two criteria:
- Every student must spend at most 30 minutes from home to the school.
- Every school should be close enough from security safe facilities, in the case of an emergency.
Based on these, your team created a map covering the city with disks of different radii. Each disk is centered at a security safe facility, and a person can move from any two points inside each disk in less than 30 minutes. Your task is now reduced to find the minimum number of construction sites such that each disk has at least one school on it. This problem is also known as the minimum hit-set problem. The mayor was impressed with your solution and started to say your name in the press.

It has been a while since your idea became public, but no solution has appeared yet. In fact, you discovered the problem is impossible to be solved in practical time (it is NP-complete). Even worst, you also discovered that it is hard to approximate (it is W[1]-hard). The clock is ticking and you should come up with a solution that runs in a reasonable amount of time (running-time analysis) and that assures you are not far away from the optimal solution (quality analysis).
In this post, we are going to focus on the quality analysis of the local search algorithm for solving the minimum hitting-set for disks in the plane.
Local search
General Minimization Problem: From a set 





Local Search: It is a heuristic that can be used to approximate the solution of difficult optimization problems. Below is a general description of a 

Input:
Output: 
- Let
.
- For each
of
.
- For each
-subset
of
- Set
.
- If
.
- Set
.
- Repeat.
- Set
- Set
- For each
This naive

Quite bad, and we don’t even know how close from the optimal solution it would be the solution returned by the local search. Nonetheless, it is generally the case that one can exploit characteristics of the problem in order to improve its running time. In particular, there exists a 3-local search algorithm for the hitting-set problem with running-time complexity of 
Besides running-time analysis, approximation algorithms must also be analyzed for its quality, which means to state how far the solution returned by the algorithm is from the optimal solution. For example, a 2-approximation algorithm for a minimization problem is guaranteed to return a solution that is at most twice the value of the optimal solution:

Hitting-Set for disks in the plane
The input of the hitting-set problem are the set 




We call the pair 










There are many range spaces that satisfy the locality condition. The range spaces formed by disks in the plane is one of them.
Theorem 1: For a collection of disks 
In order to proof theorem 1 we are going to need some quick facts about Delaunay Triangulation. It will be useful to take a look at some material on Delaunay Triangulations and Voronoi Diagrams if you are not familiar with them before proceeding the reading.

Let 

Fact 1 (empty circle property): The circle defined by any three points of 
Claim 1: Any collection of disks
Proof:
Assume there exists a collection of disks in which the induced graph is not connected. Take the smallest disk 




We are now ready to prove theorem 1!
Theorem 1: For a collection of disks
Proof:
Set the graph 






 .
.The key idea in the quality analysis is to use the optimal set 

Assume, for one moment, that sets 

The sets 


Notice that 
![\begin{array}{rl} |S^\prime| + |I| &\leq C \cdot |O^\prime| + |I| + \leq C \cdot |O^\prime| + C\cdot |I|\\[0.2in] |S| & \leq C \cdot |O|. \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brl%7D+%7CS%5E%5Cprime%7C+%2B+%7CI%7C+%26%5Cleq+C+%5Ccdot+%7CO%5E%5Cprime%7C+%2B+%7CI%7C+%2B+%5Cleq+C+%5Ccdot+%7CO%5E%5Cprime%7C+%2B+C%5Ccdot+%7CI%7C%5C%5C%5B0.2in%5D+%7CS%7C+%26+%5Cleq+C+%5Ccdot+%7CO%7C.+%5Cend%7Barray%7D&bg=ffffff&fg=000000&s=0&c=20201002)
Therefore, if we find an expression for the disjoint sets 

Quality Analysis
When the 


For every subset 


where 

Theorem 2: Let 



The proof is a little bit long, and just a sketch will be presented here. The full proof can be checked in the references.
From Euller’s formula for planar graphs:
![\begin{array}{rl} |E| &\leq 2|V|\\[0.2in] \displaystyle 2\cdot |B_{=2}| + 3 \cdot |B_{=3}| + 4 \cdot |B_{\geq4}| \leq \sum_{i}{i|B_{=i}|} &\leq \displaystyle 2 \cdot \left( |R| + |B| \right), \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brl%7D+%7CE%7C+%26%5Cleq+2%7CV%7C%5C%5C%5B0.2in%5D+%5Cdisplaystyle+2%5Ccdot+%7CB_%7B%3D2%7D%7C+%2B+3+%5Ccdot+%7CB_%7B%3D3%7D%7C+%2B+4+%5Ccdot+%7CB_%7B%5Cgeq4%7D%7C+%5Cleq+%5Csum_%7Bi%7D%7Bi%7CB_%7B%3Di%7D%7C%7D+%26%5Cleq+%5Cdisplaystyle+2+%5Ccdot+%5Cleft%28+%7CR%7C+%2B+%7CB%7C+%5Cright%29%2C+%5Cend%7Barray%7D&bg=ffffff&fg=000000&s=0&c=20201002)
where 


Therefore, in order to prove
![\begin{array}{rl} |B| &\leq 4|R|\\[0.2in] \displaystyle |B_{=2}| + |B_{=3}| + |B_{\geq4}| \leq |B_{=2}| + \frac{|B_{=3}|}{2} + |R| &\leq 4|R|\\[0.2in] \displaystyle |B_{=2}| + \frac{|B_{=3}|}{2} & \displaystyle \leq 3|R|. \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brl%7D+%7CB%7C+%26%5Cleq+4%7CR%7C%5C%5C%5B0.2in%5D+%5Cdisplaystyle+%7CB_%7B%3D2%7D%7C+%2B+%7CB_%7B%3D3%7D%7C+%2B+%7CB_%7B%5Cgeq4%7D%7C+%5Cleq+%7CB_%7B%3D2%7D%7C+%2B+%5Cfrac%7B%7CB_%7B%3D3%7D%7C%7D%7B2%7D+%2B+%7CR%7C+%26%5Cleq+4%7CR%7C%5C%5C%5B0.2in%5D+%5Cdisplaystyle+%7CB_%7B%3D2%7D%7C+%2B+%5Cfrac%7B%7CB_%7B%3D3%7D%7C%7D%7B2%7D+%26+%5Cdisplaystyle+%5Cleq+3%7CR%7C.+%5Cend%7Barray%7D&bg=ffffff&fg=000000&s=0&c=20201002)
In order to show the latter inequality, construct the auxiliar graph 

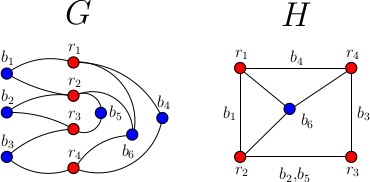 Assume the graph
Assume the graph 






Some notation will be helpful. Let 


It is easy to see that the following claims are true.
Claim 2: For 


Claim 3: For 

Claim 4: For 

The key idea of the proof is to define a weight function 

Extending this definition to the graph
![\begin{array}{rl} \displaystyle w(H) = \sum_{f \in F} w(f) &= \displaystyle |E_1| + 2|E_2| + \frac{|B_{=3}^f|}{2}\\[0.2in] &= \displaystyle |B_{=2}| + \frac{|B_{=3}^f|}{2}. \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+w%28H%29+%3D+%5Csum_%7Bf+%5Cin+F%7D+w%28f%29+%26%3D+%5Cdisplaystyle+%7CE_1%7C+%2B+2%7CE_2%7C+%2B%C2%A0%5Cfrac%7B%7CB_%7B%3D3%7D%5Ef%7C%7D%7B2%7D%5C%5C%5B0.2in%5D+%26%3D+%5Cdisplaystyle+%7CB_%7B%3D2%7D%7C+%2B+%5Cfrac%7B%7CB_%7B%3D3%7D%5Ef%7C%7D%7B2%7D.+%5Cend%7Barray%7D&bg=ffffff&fg=000000&s=0&c=20201002)
By using claims 2-4, it is possible to show that (details in [3])

Concluding Remarks
In fact, the quality analysis just shown can be used for every problem in which it is possible to construct the locality graph 
- Maximum independent set in the intersection graph of disks in the plane.
- Terrain guarding problem.
- Minimum dominating set in disk intersection graphs.
- Minimum set-cover for disks in the plane.
Further Reading
[1] – Bus, Norbert; Garg, Shashwat; Mustafa H., Nabil; Ray, Saurabh. Improved Local Search for Geometric Hitting Set.
[2] – Bus, Norbert; Garg, Shashwat; Mustafa H., Nabil; Ray, Saurabh. Limits of Local Search: Quality and Efficiency.
[3] – Antunes, Daniel; Mathieu, Claire; Mustafa H., Nabil. Combinatorics of Local Search: An Optimal 4-Local Hall’s Theorem for Planar Graphs.

One thought on “4-Local Search gives a 4-approximation algorithm to the Geometric Hitting Set Problem”